SMOOTH 25PM DLA
PM-Linearaktuator Ø 25 mm
geführte Spindel - captive
flache Version mit geringer Bautiefe
verstärkte Version mit sternförmiger Führung
mit Kugellager
Auflösung von 0.0127 mm bis 0.1016 mm / Schritt
25 PM Linearaktuator - flexibel - preisgünstig - viele Bauformen
Bauform
captive Bauform
verstärkte Version verfügbar
Ø 25mm Durchmesser
Bauform
captive Bauform
verstärkte Version verfügbar
Ø 25mm Durchmesser
elektrische Daten
PM-Schrittmotor 7.5° / 15° Bipolar
15 / 73 Ohm bipolare Wicklung
160 / 330 mA Phasenstrom
elektrische Daten
PM-Schrittmotor 7.5° / 15° Bipolar
15 / 73 Ohm bipolare Wicklung
160 / 330 mA Phasenstrom
mechanische Daten
Auflösung 0.0127 - 0.1016 / Schritt
Hub captive 15 / 25 / 32 mm
max. Linearforce 52 N
Temp.-Bereich -20 - 70° C
5.000.000 Zyklen Lebensdauer
mechanische Daten
Auflösung 0.0127 - 0.1016 / Schritt
Hub captive 15 / 25 / 32 mm
max. Linearforce 52 N
Temp.-Bereich -20 - 70° C
5.000.000 Zyklen Lebensdauer
Optionen
Sonderwelle auf Anfrage
Kabelkonfektionierung
lieferbar ohne FrontplatteOptionen
Sonderwelle auf Anfrage
Kabelkonfektionierung
lieferbar ohne FrontplatteDatenblatt 15PM Smooth
STEP-Fille senden wir gerne auf Anfarge zu
 Please select a Dropfiles content to activate the preview
Please select a Dropfiles content to activate the previewDownload Gesamtkatalog
SMOOTH Katalog
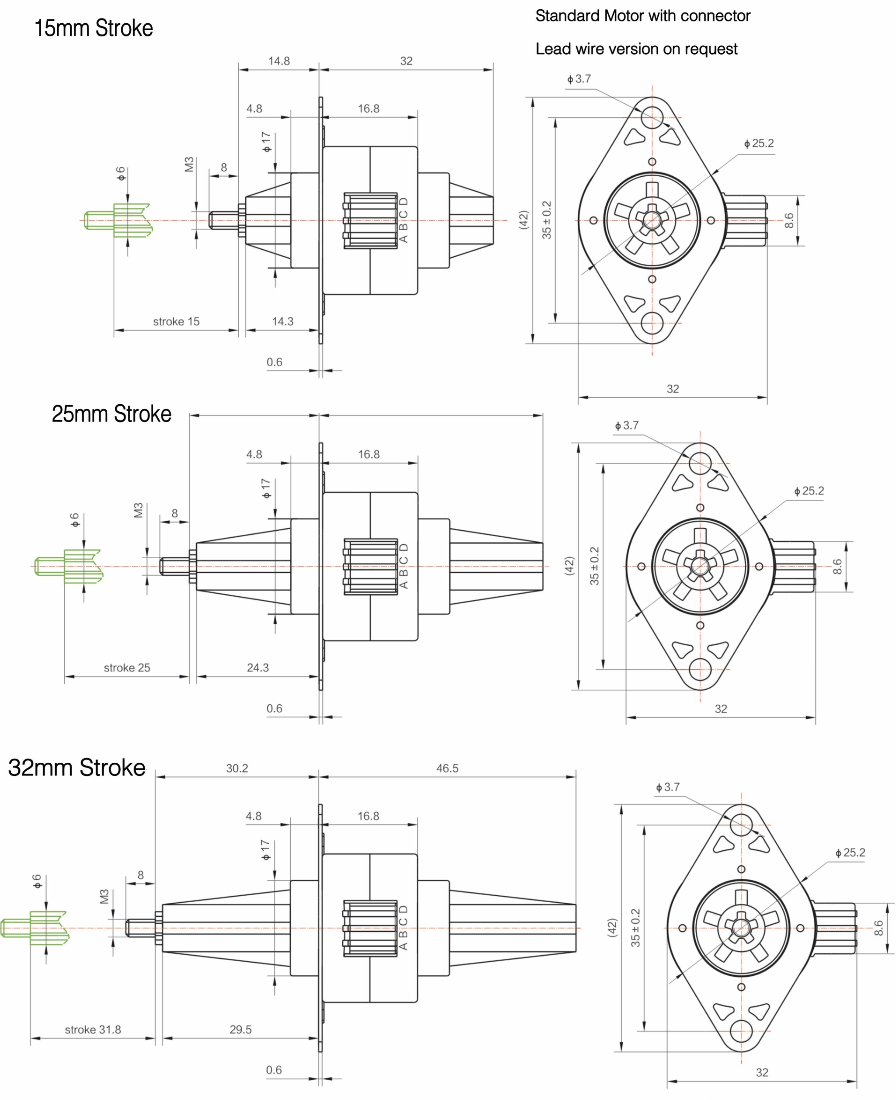
Abmessungen 25PM captive - verstärkte Version

SMOOTH Ø 25 mm DLA 25PM captive improved 15 - 25 - 32mm Hub
Abmessungen 25PM captive - verstärkte Version
SMOOTH Ø 25 mm DLA 25PM captive improved 15 - 25 - 32mm Hub
| Motor-Type Spindel max 160mm | Motor Typ captive 15mm Hub | Motor Typ captive 23mm Hub | Motor-Typ non-captive | Volt (V) | Strom (mA) | Pitch Spindel (mm) | Auflösung/Step (mm) | Linear Kraft @100pps (N) | Ohm (Ω) |
|---|---|---|---|---|---|---|---|---|---|
| 20PM501-80N | 20PM501-D15 | 20PM501-D23 | 20PM501-T1 | 5 | 250 | 0,6096 | 0,0254 | 31 | 20 |
| 20PM502-80N | 20PM502-D15 | 20PM502-D23 | 20PM502-T1 | 5 | 250 | 1 | 0,0417 | 22 | 20 |
| 20PM503-80N | 20PM503-D15 | 20PM503-D23 | 20PM503-T1 | 5 | 250 | 1.2192 | 0.0508 | 19 | 20 |
| 20PM504-80N | 20PM504-D15 | 20PM504-D23 | 20PM504-T1 | 5 | 250 | 2.4384 | 0.1016 | 10 | 20 |
| 20PM511-80N | 20PM511-D15 | 20PM511-D23 | 20PM511-T1 | 12 | 100 | 0.6096 | 0.0254 | 31 | 115 |
| 20PM512-80N | 20PM512-D15 | 20PM512-D23 | 20PM512-T1 | 12 | 100 | 1 | 0.0417 | 22 | 115 |
| 20PM513-80N | 20PM513-D15 | 20PM513-D23 | 20PM513-T1 | 12 | 100 | 1.2192 | 0.0508 | 19 | 115 |
| 20PM514-80N | 20PM514-D15 | 20PM514-D23 | 20PM514-T1 | 12 | 100 | 2.4384 | 0.1016 | 10 | 115 |
| 20PM101-80N | 20PM101-D15 | 20PM101-D23 | 20PM101-T1 | 5 | 250 | 0.6096 | 0.0254 | 30 | 18 |
| 20PM102-80N | 20PM102-D15 | 20PM102-D23 | 20PM102-T1 | 5 | 250 | 1 | 0.0417 | 24 | 18 |
| 20PM103-80N | 20PM103-D15 | 20PM103-D23 | 20PM103-T1 | 5 | 250 | 1.2192 | 0.0508 | 20 | 18 |
| 20PM104-80N | 20PM104-D15 | 20PM104-D23 | 20PM104-T1 | 5 | 250 | 2.4384 | 0.1016 | 11 | 18 |
| 20PM111-80N | 20PM111-D15 | 20PM111-D23 | 20PM111-T1 | 12 | 160 | 0.6096 | 0.0254 | 30 | 75 |
| 20PM112-80N | 20PM112-D15 | 20PM112-D23 | 20PM112-T1 | 12 | 160 | 1 | 0.0417 | 24 | 75 |
| 20PM113-80N | 20PM113-D15 | 20PM113-D23 | 20PM113-T1 | 12 | 160 | 1.2192 | 0.0508 | 20 | 75 |
| 20PM114-80N | 20PM114-D15 | 20PM114-D23 | 20PM114-T1 | 12 | 160 | 2.4384 | 0.1016 | 11 | 75 |
✅ Frage: Was ist die richtige Bezeichnung für den Antrieb und wofür steht DLA?
✅ Antwort: Die korrekte Bezeichnung lautet DLA – Digitaler Linearaktuator. Häufig wird fälschlicherweise von einem „Linearmotor“ gesprochen. Dieser Begriff ist jedoch technisch nicht korrekt: Ein klassischer Linearmotor erzeugt eine direkte lineare Bewegung durch elektromagnetische Felder – vergleichbar mit einem entfalteten Drehstrommotor, bei dem ein Läufer entlang eines Magnetfeldes verläuft.
Beim DLA hingegen wird die rotatorische Bewegung eines Schrittmotors über eine Spindelmechanik in eine lineare Bewegung umgesetzt. Es handelt sich also nicht um eine direkte lineare Kraftentwicklung durch Magnetfelder, sondern um eine präzise Umwandlung von Drehbewegung in Vorschub.
Das „digitale“ im Namen erklärt sich dadurch, dass der Vorschub der Spindel schrittweise erfolgt: Mit jedem einzelnen Schritt des Motors wird die Spindel um einen definierten Betrag bewegt. Diese quantisierte Bewegung erlaubt es, die lineare Positionierung sehr einfach digital über Steuerimpulse (0/1-Signale) anzusprechen und mit hoher Genauigkeit zu wiederholen.
✅ Antwort: Die korrekte Bezeichnung lautet DLA – Digitaler Linearaktuator. Häufig wird fälschlicherweise von einem „Linearmotor“ gesprochen. Dieser Begriff ist jedoch technisch nicht korrekt: Ein klassischer Linearmotor erzeugt eine direkte lineare Bewegung durch elektromagnetische Felder – vergleichbar mit einem entfalteten Drehstrommotor, bei dem ein Läufer entlang eines Magnetfeldes verläuft.
Beim DLA hingegen wird die rotatorische Bewegung eines Schrittmotors über eine Spindelmechanik in eine lineare Bewegung umgesetzt. Es handelt sich also nicht um eine direkte lineare Kraftentwicklung durch Magnetfelder, sondern um eine präzise Umwandlung von Drehbewegung in Vorschub.
Das „digitale“ im Namen erklärt sich dadurch, dass der Vorschub der Spindel schrittweise erfolgt: Mit jedem einzelnen Schritt des Motors wird die Spindel um einen definierten Betrag bewegt. Diese quantisierte Bewegung erlaubt es, die lineare Positionierung sehr einfach digital über Steuerimpulse (0/1-Signale) anzusprechen und mit hoher Genauigkeit zu wiederholen.



